Michael G. Fritzius
3440-D Evergreen Lane; St. Louis, MO 63125
Cell: (636) 692-1426
code_monkey@slashmail.org
Work History: Control MicroSystems
405 Main Street--Fenton, MO 63026
October 2006 to Present
Full time employment--Lead programmer for embedded projects (microchips) covering a wide array of applications: stationary and handheld wastewater treatment modules, fuel sensors and cellular modem transmitters. Also created joint applications that interface microchips with computers for fast data transfers to free up resources from the device level. Programming languages used were:
· C for all embedded development (microchip-level programming)
· Java for some graphic interfaces concerning fuel level sensors
· C# for all graphic interfaces and front-end/back-end applications for customers
Schnucks Supermarkets
1393 Big Bend Road--Suite 1--Ballwin, MO 63021
October 2001 to April 2008
Part time employment—Customer Service, catering, face-to-face and over-the-phone customer interaction, various maintenance duties.
LMC Industries
100 Manufacturers Drive—Tenbrook Industrial Park
Arnold, MO 63010
About May 2001 to July 2001
Full time employment—operation of metal stamping die machines, performed quality testing of parts, tolerance and breakage analysis and occasional maintenance of the machines.
Computer Skills: Experienced computer assembly (10+ years), Programming (5+ years), Knowledgeable in C, C++, .NET, OpenGL, C# and Java, Network Programming, SMTP and POP3 Mail operation, Hardware-to-PC Interface for Data Analysis
Other Skills: Graphics/General Application Programming (DOS), Technical Writing, Customer Management Skills, Electronics Assembly and Soldering
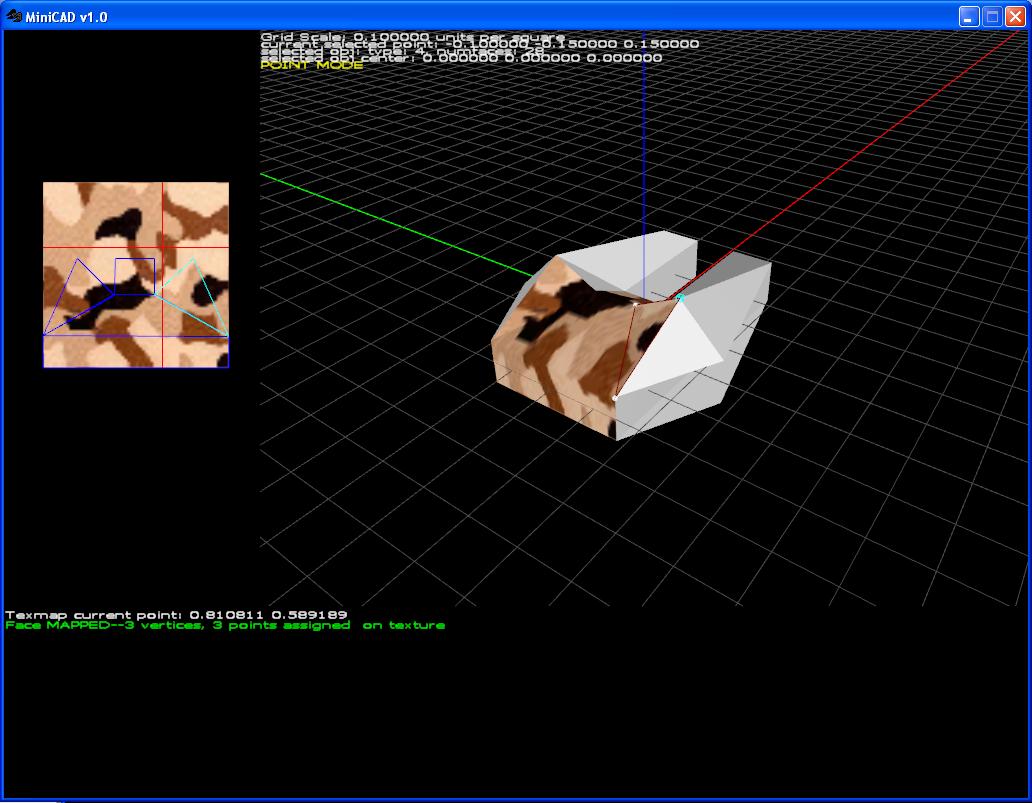
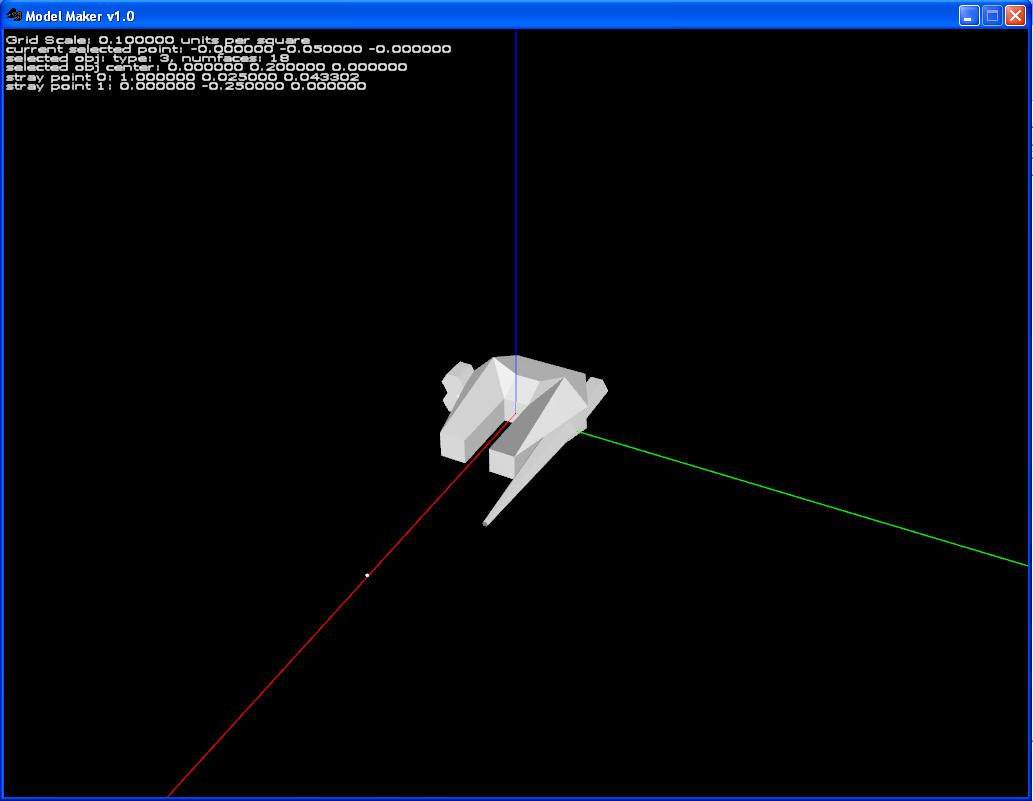
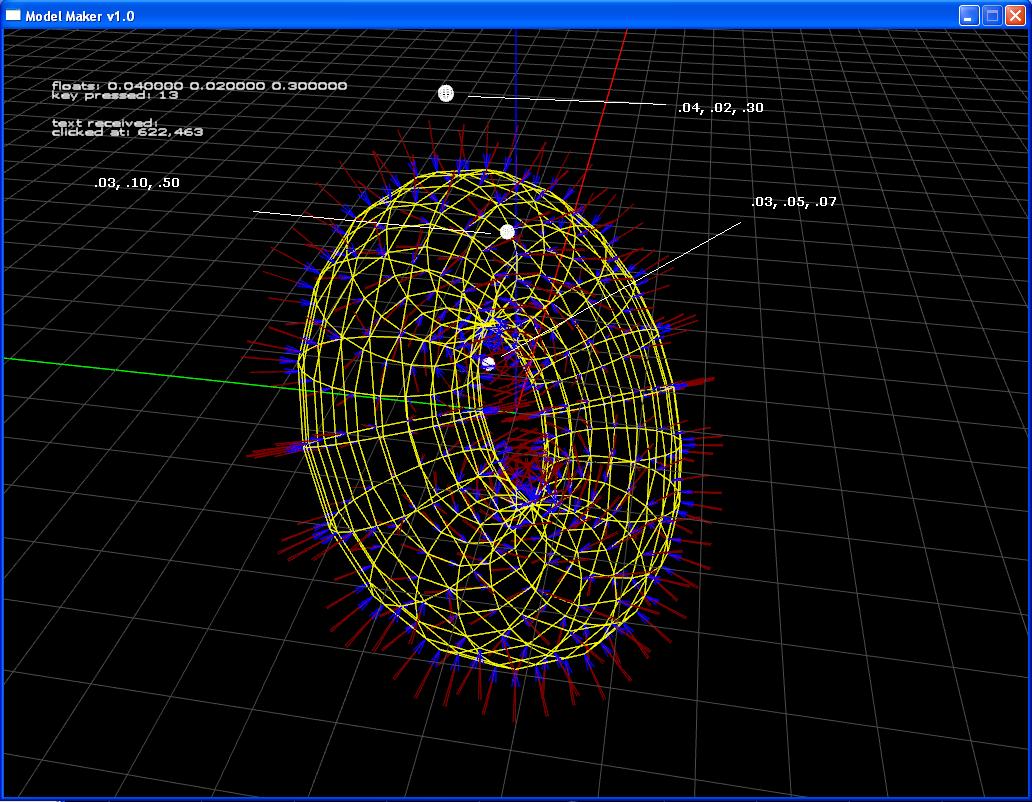
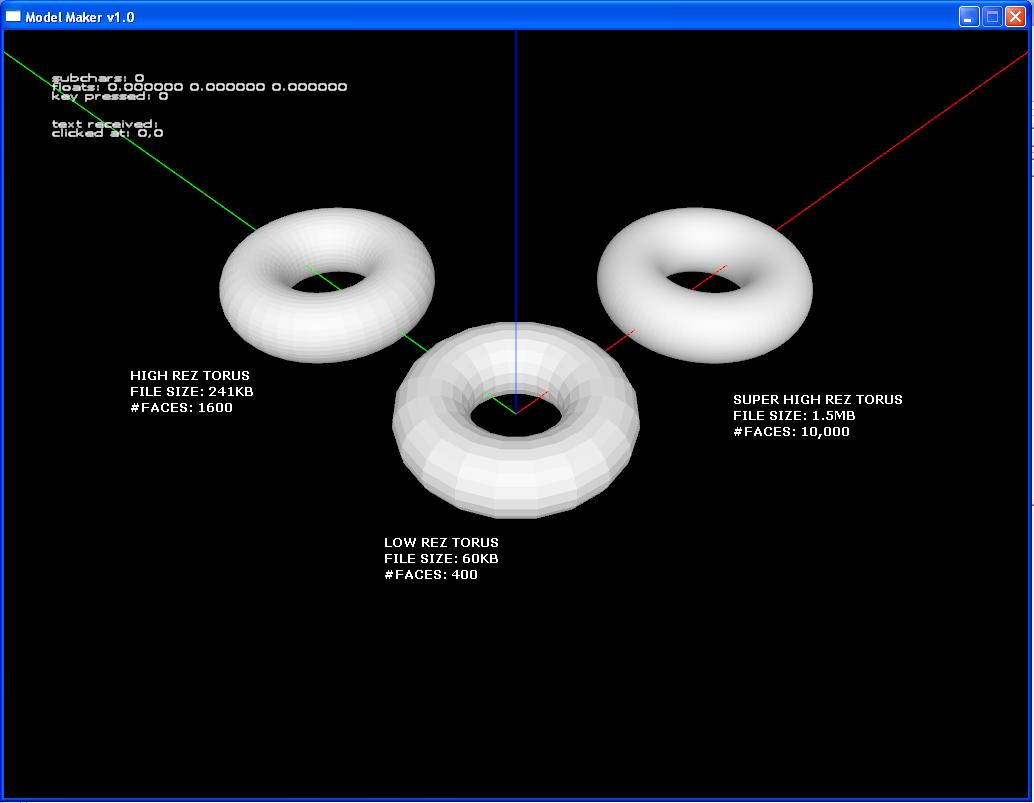
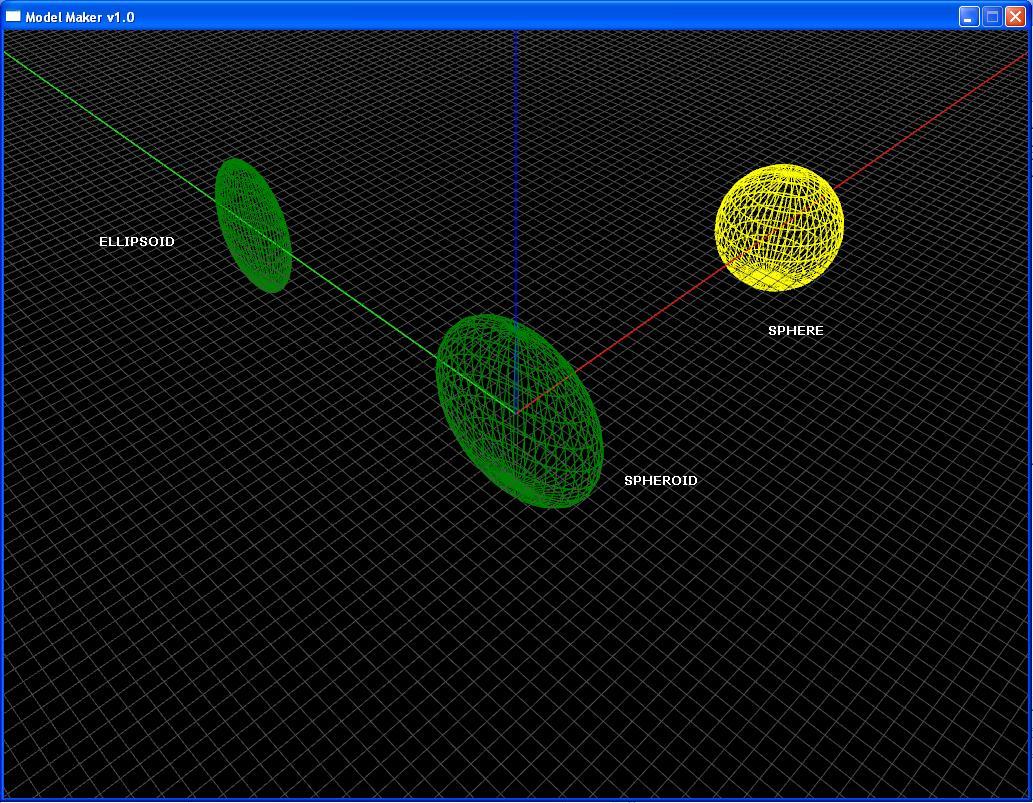
Current Projects: A miniature version of AutoCAD that will be used in upcoming game projects whose goal is to facilitate the creation of 3D objects and models. The entire project is currently written in OpenGL based in C++. This program handles texturing/skinning operations, “smoothing” algorithms, allows the user complete control over model viewing, and will evolve to handle model animation. The final release will be open source and will be ported to C# for ease of use. An overview can be found at:
http://www.minicad-michael.blogspot.com/
An aftermarket field camera modification for hunters that can transmit its payload of pictures to an email address, whose processor is loaded with code written in C. This device “piggybacks” on the camera and controls access to an SD card while the camera is in an idle state. Information is retrieved from the SD card by using the FAT16 file system. The device then initiates an internet connection via a cellular modem. Emails can then be sent to any destination using the SMTP protocol, which includes the desired picture encoded in the attachment section of the email per RFC 822 protocol. The end result is an email sent to the customer containing the most recent picture.
Past Successes: Designed software for a car seat “reminder” that plays music when a child is occupying the seat and the car hasn’t moved for a short time. The device senses movement with the use of a small digital accelerometer, and can discriminate between vehicle movement and the child jumping in the seat. This project was taken on in response to summertime fatalities of children being left in vehicles. This project was also a finalist entry in the JPMA Awards in Late Summer 2008. Information regarding this project can be found at
www.carseatmonitor.com. Code for the device itself was written in C, with some analysis software being written in C#.
Developed software for devices used in storm water monitoring systems. These devices detect the amount of particulate matter in runoff, and alert the customer to send a clean-up team. This solution was put in place to save money--instead of sending a clean-up team at scheduled intervals, they can be sent when needed. The information is sent from the remote devices through a cellular modem in SMS (text message) format to a main email address. A GUI (written in C#) then intercepts and processes these messages and sends alerts depending on what information has been received. Currently, both the remote devices and the GUI are under testing and it is foreseen that up to 1,000 units are to be sold annually. These devices feature code written in C.
Designed and tested a handheld sludge detector for use in sewage treatment plants. The sludge must be monitored regularly to ensure that a backup does not occur. This device is meant to replace the clear core-sampler tubes, which are used to measure where the sludge blanket is by pulling up a vertical cylindrical sample of the fluid in the treatment tank. These tubes are not only unwieldy (being up to 16 feet long), but also become brittle with use and can snap in the wintertime--so a different solution was presented. The handheld unit is portable and battery powered and uses an infrared emitter-receiver pair, along with a pressure sensor, to determine at what depth the sludge blanket is located. The code for these pieces was also written in C.
Created and tested a wide variety of device-to-PC GUIs for use in data processing--the most recent being used for the car seat reminder described above. The basic design of these GUIs is two-pronged: the first phase is devoted to collecting raw data, while the second is a “playback” mode, showing the data on-screen as if it were real time, making debugging and algorithms much more efficient. All of these programs were created using C#, and were central to the final stages of device development.
Programmed a passive fuel level sensor for Chrysler Corporation to replace the classic “floating ball” mechanical version. Also modified a previously designed GUI written in Java that interfaced the sensor with a PC to provide examination of operation of the sensor, which made it possible to come up with a better decision algorithm. The sensor has built-in “slosh detection” to prevent false decisions due to moving fuel. Also tested in a variety of temperatures to make sure the sensor would operate normally under all conditions. The code for these sensors was written in C.
Designed software in C# for a multiple solenoid timer tester (up to ten timers simultaneously) that communicates with a PC via RS232 cable. The software receives information from a testing board and determines if the timers are switching on and off at the appropriate times. It allows a user to pick a tolerance of values around the target times for each event.
Education: University of Missouri—St. Louis Bachelor of Science, May 2006, Computer Science—Minor in Philosophy, Mathematics
Jefferson College—Hillsboro Electronics Certificate, A.A.S. Industrial Automation, May 2003
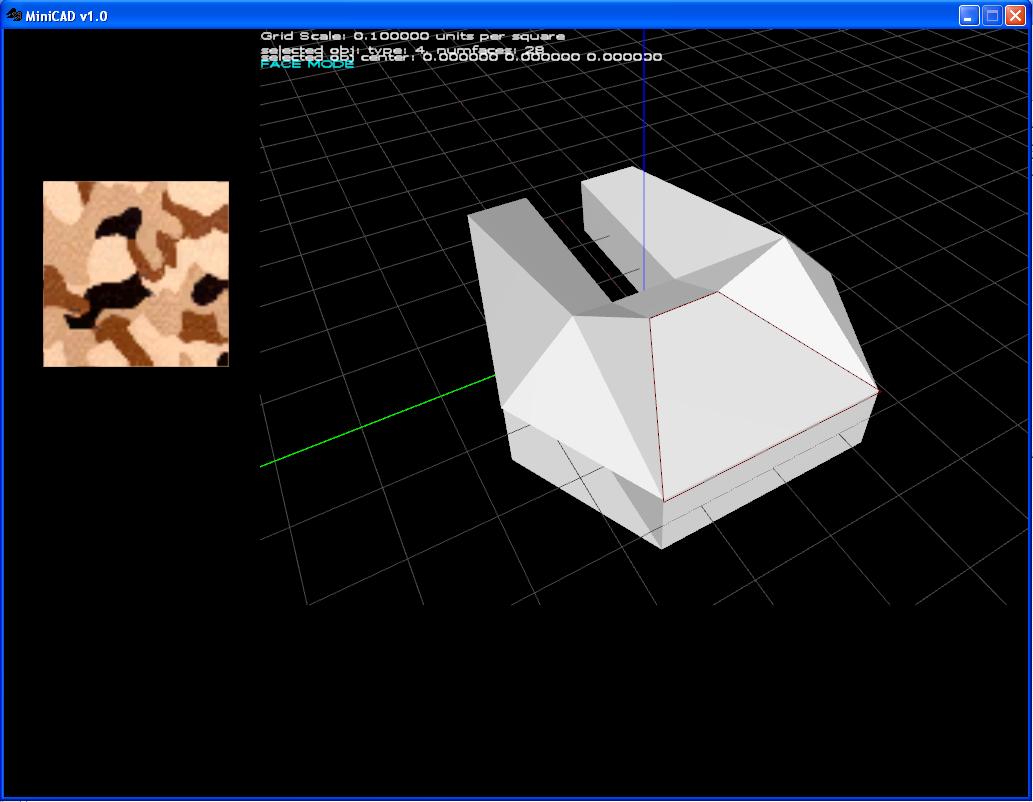 The texture mapper for the most part is complete. Here's a screenshot of it being started. When the command "tex" is entered, the screen changes perspective to make room for the texture and any accompanying data. The example texture here is called "desertcamo.bmp" and is loaded with the "loadtex" command.
The texture mapper for the most part is complete. Here's a screenshot of it being started. When the command "tex" is entered, the screen changes perspective to make room for the texture and any accompanying data. The example texture here is called "desertcamo.bmp" and is loaded with the "loadtex" command.